§3.1 Arithmetics and Error Measures
Contents
- §3.1(i) Floating-Point Arithmetic
- §3.1(ii) Interval Arithmetic
- §3.1(iii) Rational Arithmetics
- §3.1(iv) Level-Index Arithmetic
- §3.1(v) Error Measures
§3.1(i) Floating-Point Arithmetic
Computer arithmetic is described for the binary based system with base 2; another system that has been used is the hexadecimal system with base 16.
A nonzero normalized binary floating-point machine number is represented as
| 3.1.1 | |||
| , | |||
where is equal to or , each , , is either or , is the most significant bit, () is the number of significant bits , is the least significant bit, is an integer called the exponent, is the significand, and is the fractional part.
The set of machine numbers is the union of and the set
| 3.1.2 | |||
with and all allowable choices of , , , and .
Let with and . For given values of , , and , the format width in bits of a computer word is the total number of bits: the sign (one bit), the significant bits ( bits), and the bits allocated to the exponent (the remaining bits). The integers , , and are characteristics of the machine. The machine epsilon , that is, the distance between and the next larger machine number with is given by . The machine precision is . The lower and upper bounds for the absolute values of the nonzero machine numbers are given by
| 3.1.3 | |||
Underflow (overflow) after computing occurs when is smaller (larger) than ().
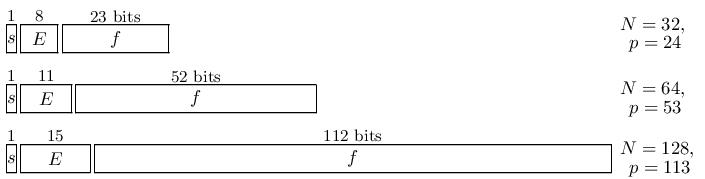
IEEE Standard
The current floating point arithmetic standard is IEEE 754-2019 IEEE (2019), a minor technical revision of IEEE 754-2008 IEEE (2008), which was adopted in 2011 by the International Standards Organization as ISO/IEC/IEEE 60559. In the case of the normalized binary interchange formats, the representation of data for binary32 (previously single precision) (, , , ), binary64 (previously double precision) (, , , ) and binary128 (previously quad precision) (, , , ) are as in Figure 3.1.1. The respective machine precisions are , and .
![\begin{picture}(152.0,38.0)(-1.0,-1.0)\put(0.0,31.0){\makebox(2.0,6.0)[]{%
\small 1}}
\put(0.0,26.0){\framebox(2.0,6.0)[]{$s$}}
\put(3.0,31.0){\makebox(8.0,6.0)[]{\small 8}}
\put(3.0,26.0){\framebox(8.0,6.0)[]{$E$}}
\put(12.0,31.0){\makebox(23.0,6.0)[]{\small 23 bits}}
\put(12.0,26.0){\framebox(23.0,6.0)[]{$f$}}
\put(133.0,31.0){$N=32$,}
\put(135.0,27.0){$p=24$}
\put(0.0,18.0){\makebox(2.0,6.0)[]{\small 1}}
\put(0.0,13.0){\framebox(2.0,6.0)[]{$s$}}
\put(3.0,18.0){\makebox(11.0,6.0)[]{\small 11}}
\put(3.0,13.0){\framebox(11.0,6.0)[]{$E$}}
\put(15.0,18.0){\makebox(52.0,6.0)[]{\small 52 bits}}
\put(15.0,13.0){\framebox(52.0,6.0)[]{$f$}}
\put(133.0,17.0){$N=64$,}
\put(135.0,13.0){$p=53$}
\put(0.0,5.0){\makebox(2.0,6.0)[]{\small 1}}
\put(0.0,0.0){\framebox(2.0,6.0)[]{$s$}}
\put(3.0,5.0){\makebox(15.0,6.0)[]{\small 15}}
\put(3.0,0.0){\framebox(15.0,6.0)[]{$E$}}
\put(19.0,5.0){\makebox(112.0,6.0)[]{\small 112 bits}}
\put(19.0,0.0){\framebox(112.0,6.0)[]{$f$}}
\put(133.0,4.0){$N=128$,}
\put(135.0,0.0){$p=113$}
\end{picture}](./3/1/F1.png)
Rounding
Let be any positive number with
| 3.1.4 | |||
, and
| 3.1.5 | ||||
Then rounding by chopping or rounding down of gives , with maximum relative error . Symmetric rounding or rounding to nearest of gives or , whichever is nearer to , with maximum relative error equal to the machine precision .
Negative numbers are rounded in the same way as .
§3.1(ii) Interval Arithmetic
Interval arithmetic is intended for bounding the total effect of rounding errors of calculations with machine numbers. With this arithmetic the computed result can be proved to lie in a certain interval, which leads to validated computing with guaranteed and rigorous inclusion regions for the results.
Let be the set of closed intervals . The elementary arithmetical operations on intervals are defined as follows:
| 3.1.6 | |||
| , | |||
where , with appropriate roundings of the end points of when machine numbers are being used. Division is possible only if the divisor interval does not contain zero.
A basic text on interval arithmetic and analysis is Alefeld and Herzberger (1983), and for applications and further information see Moore (1979) and Petković and Petković (1998). The last reference includes analogs for arithmetic in the complex plane . For interval arithmetic, one should refer to the IEEE Standards for Interval Arithmetic IEEE (2015, 2018).
§3.1(iii) Rational Arithmetics
Computer algebra systems use exact rational arithmetic with rational numbers , where and are multi-length integers. During the calculations common divisors are removed from the rational numbers, and the final results can be converted to decimal representations of arbitrary length. For further information see Matula and Kornerup (1980).
§3.1(iv) Level-Index Arithmetic
To eliminate overflow or underflow in finite-precision arithmetic numbers are represented by using generalized logarithms given by
| 3.1.7 | ||||
| , | ||||
with and the unique nonnegative integer such that . In level-index arithmetic is represented by (or for negative numbers). Also in this arithmetic generalized precision can be defined, which includes absolute error and relative precision (§3.1(v)) as special cases.
§3.1(v) Error Measures
If is an approximation to a real or complex number , then the absolute error is
| 3.1.8 | |||
If , the relative error is
| 3.1.9 | |||
The relative precision is
| 3.1.10 | |||
where for real variables, and for complex variables (with the principal value of the logarithm).
The mollified error is
| 3.1.11 | |||
For error measures for complex arithmetic see Olver (1983).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}