integration by parts
(0.003 seconds)
11—20 of 77 matching pages
11: 2.10 Sums and Sequences
…
►
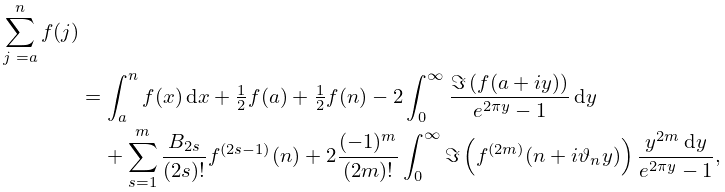
2.10.2
…
►This identity can be used to find asymptotic approximations for large when the factor changes slowly with , and is oscillatory; compare the approximation of Fourier integrals by integration by parts in §2.3(i).
…
►In these circumstances the integrals in (2.10.28) are integrable by parts
times, yielding
…
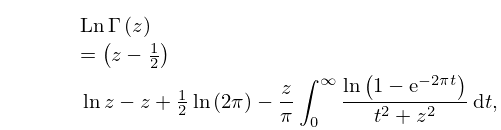
12: 5.9 Integral Representations
…
►
5.9.10_1
…
13: 2.11 Remainder Terms; Stokes Phenomenon
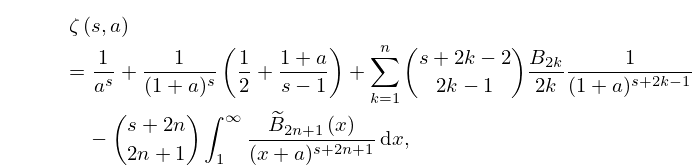
14: 25.11 Hurwitz Zeta Function
15: 18.18 Sums
…
►
Expansion of functions
►In all three cases of Jacobi, Laguerre and Hermite, if is on the corresponding interval with respect to the corresponding weight function and if are given by (18.18.1), (18.18.5), (18.18.7), respectively, then the respective series expansions (18.18.2), (18.18.4), (18.18.6) are valid with the sums converging in sense. … ►See (18.17.45) and (18.17.49) for integrated forms of (18.18.22) and (18.18.23), respectively. …16: 2.5 Mellin Transform Methods
17: 21.9 Integrable Equations
…
►Riemann theta functions arise in the study of integrable differential
equations that have applications in many areas, including fluid mechanics (Ablowitz and Segur (1981, Chapter 4)), magnetic monopoles (Ercolani and Sinha (1989)), and string theory (Deligne et al. (1999, Part 3)).
…
18: 1.18 Linear Second Order Differential Operators and Eigenfunction Expansions
19: 8.6 Integral Representations
…
►
8.6.3
.
…
►
8.6.7
.
…
►
8.6.9
, ,
►where the integration path passes above or below the pole at , according as upper or lower signs are taken.
…
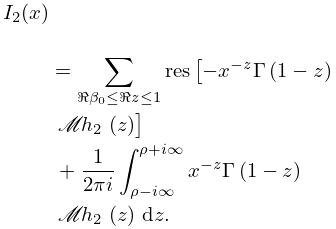
►In (8.6.10)–(8.6.12), is a real constant and the path of integration is indented (if necessary) so that in the case of (8.6.10) it separates the poles of the gamma function from the pole at , in the case of (8.6.11) it is to the right of all poles, and in the case of (8.6.12) it separates the poles of the gamma function from the poles at .
…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}