…
►To avoid instability the rows are interchanged at each elimination step in such a way that the absolute value of the element that is used as a divisor, the
pivot element, is not less than that of the other available elements in its column.
…This modification is called
Gaussian elimination with partial pivoting.
►For more information on
pivoting see
Golub and Van Loan (1996, pp. 109–123).
…
►Assume that
can be factored as in (
3.2.5), but without
partial pivoting.
…
…
►
§1.5(i) Partial Derivatives
…
►The function
is
continuously differentiable if
,
, and
are continuous,
and
twice-continuously differentiable if also
,
,
, and
are continuous.
…
►Sufficient conditions for validity are: (a)
and
are continuous on a rectangle
,
; (b) when
both
and
are continuously differentiable and lie in
.
…
►Suppose that
are finite,
is finite or
, and
,
are continuous on the partly-closed rectangle or infinite strip
.
Suppose also that
converges and
converges uniformly on
, that is, given any positive number
, however small, we can find a number
that is independent of
and is such that
…
…
►Let
, and
be an
-tuple with 1 in the
th place and 0’s elsewhere.
…
►If
, then elimination of
between (
19.18.11) and (
19.18.12), followed by the substitution
, produces the Gauss hypergeometric equation (
15.10.1).
…
►
19.18.14
…
►
19.18.15
…
►
19.18.16
…
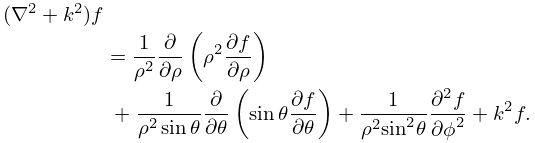
§16.14 Partial Differential Equations
►
§16.14(i) Appell Functions
►
►
…
►In addition to the four Appell functions there are
other sums of double series that cannot be expressed as a product of two
functions, and which satisfy pairs of linear
partial differential equations of the second order.
…
…
►
10.38.2
.
…
►For
at
combine (
10.38.1), (
10.38.2), and (
10.38.4).
►
10.38.4
►
…
►
10.38.7
…
…
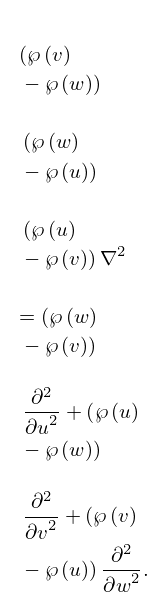
►
§23.21(ii) Nonlinear Evolution Equations
►Airault et al. (1977) applies the function
to an integrable classical many-body problem, and relates the solutions to nonlinear
partial differential equations.
…
►
23.21.2
…
►
23.21.5
…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}