35 Functions of Matrix ArgumentProperties35.6 Confluent Hypergeometric Functions of Matrix Argument35.8 Generalized Hypergeometric Functions of Matrix Argument
§35.7 Gaussian Hypergeometric Function of Matrix Argument
Contents
- §35.7(i) Definition
- §35.7(ii) Basic Properties
- §35.7(iii) Partial Differential Equations
- §35.7(iv) Asymptotic Approximations
§35.7(i) Definition
| 35.7.1 | |||
| , ; . | |||
Jacobi Form
| 35.7.2 | |||
| ; ; . | |||
§35.7(ii) Basic Properties
Case
| 35.7.3 | |||
Confluent Form
| 35.7.4 | |||
Integral Representation
| 35.7.5 | |||
| , . | |||
Transformations of Parameters
| 35.7.6 | |||
Gauss Formula
| 35.7.7 | |||
| . | |||
Reflection Formula
| 35.7.8 | |||
| ; for some ; and for all . | |||
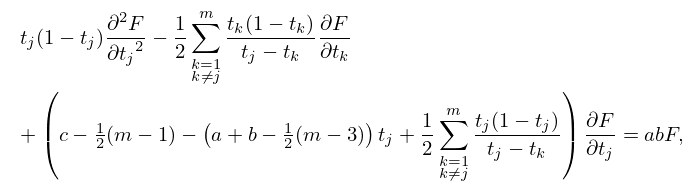
§35.7(iii) Partial Differential Equations
Let (a) be orthogonally invariant, so that is a symmetric function of , the eigenvalues of the matrix argument ; (b) be analytic in in a neighborhood of ; (c) satisfy . Subject to the conditions (a)–(c), the function is the unique solution of each partial differential equation
| 35.7.9 | |||
for .

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}