of the path order
(0.002 seconds)
11—17 of 17 matching pages
11: 1.10 Functions of a Complex Variable
…
►The function on is said to be analytically continued along the path
, , if there is a chain , .
…
►Here and elsewhere in this subsection the path
is described in the positive sense.
…
►(b) By specifying the value of at a point (not a branch point), and requiring to be continuous on any path that begins at and does not pass through any branch points or other singularities of .
►If the path circles a branch point at , times in the positive sense, and returns to without encircling any other branch point, then its value is denoted conventionally as .
…
►is analytic in and its derivatives of all orders can be found by differentiating under the sign of integration.
…
12: 2.8 Differential Equations with a Parameter
…
►For example, can be the order of a Bessel function or degree of an orthogonal polynomial.
…
►The regions of validity comprise those points that can be joined to in by a path
along which is nondecreasing or nonincreasing as passes from to .
…
►
§2.8(iv) Case III: Simple Pole
… ►For a coalescing turning point and double pole see Boyd and Dunster (1986) and Dunster (1990b); in this case the uniform approximants are Bessel functions of variable order. … ►Lastly, for an example of a fourth-order differential equation, see Wong and Zhang (2007). …13: 10.74 Methods of Computation
…
►As described in §3.7(ii), to insure stability the integration path must be chosen in such a way that as we proceed along it the wanted solution grows in magnitude at least as fast as all other solutions of the differential equation.
…
►If values of the Bessel functions , , or the other functions treated in this chapter, are needed for integer-spaced ranges of values of the order
, then a simple and powerful procedure is provided by recurrence relations typified by the first of (10.6.1).
…
►In the case of , the need for initial values can be avoided by application of Olver’s algorithm (§3.6(v)) in conjunction with Equation (10.12.4) used as a normalizing condition, or in the case of noninteger orders, (10.23.15).
…
►
§10.74(viii) Functions of Imaginary Order
►For the computation of the functions and defined by (10.45.2) see Temme (1994c) and Gil et al. (2002d, 2003a, 2004b).14: 10.17 Asymptotic Expansions for Large Argument
…
►
§10.17(iii) Error Bounds for Real Argument and Order
… ►§10.17(iv) Error Bounds for Complex Argument and Order
… ►where denotes the variational operator (2.3.6), and the paths of variation are subject to the condition that changes monotonically. … ►
10.17.18
.
…
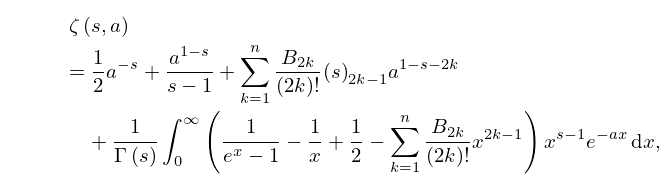
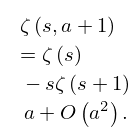
15: 25.11 Hurwitz Zeta Function
16: 13.29 Methods of Computation
…
►As described in §3.7(ii), to insure stability the integration path must be chosen in such a way that as we proceed along it the wanted solution grows in magnitude at least as fast as all other solutions of the differential equation.
…
►
13.29.4
.
…
17: 3.5 Quadrature
…
►For these cases the integration path may need to be deformed; see §3.5(ix).
…
►

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}