%E4%BA%9A%E6%B4%B2%E5%8D%9A%E5%BD%A9%E5%B9%B3%E5%8F%B0,%E4%BA%9A%E6%B4%B2%E5%8D%9A%E5%BD%A9%E5%85%AC%E5%8F%B8,%E3%80%90%E4%BA%9A%E6%B4%B2%E5%8D%9A%E5%BD%A9%E7%BD%91%E5%9D%80%E2%88%B622kk33.com%E3%80%91%E4%BD%93%E8%82%B2%E5%8D%9A%E5%BD%A9%E5%85%AC%E5%8F%B8%E6%8E%92%E5%90%8D,%E6%9C%80%E5%A4%A7%E7%9A%84%E5%8D%9A%E5%BD%A9%E5%85%AC%E5%8F%B8,%E4%BA%9A%E6%B4%B2%E4%BD%93%E8%82%B2%E5%8D%9A%E5%BD%A9%E5%B9%B3%E5%8F%B0%E3%80%90%E7%BA%BF%E4%B8%8A%E5%8D%9A%E5%BD%A9%E2%88%B622kk33.com%E3%80%91%E7%BD%91%E5%9D%80ZEkEnBDkCBgfk0kC
(0.057 seconds)
11—20 of 601 matching pages
11: 34.10 Zeros
…
►Such zeros are called nontrivial zeros.
►For further information, including examples of nontrivial zeros and extensions to symbols, see Srinivasa Rao and Rajeswari (1993, pp. 133–215, 294–295, 299–310).
12: 34.13 Methods of Computation
…
►Methods of computation for and symbols include recursion relations, see Schulten and Gordon (1975a), Luscombe and Luban (1998), and Edmonds (1974, pp. 42–45, 48–51, 97–99); summation of single-sum expressions for these symbols, see Varshalovich et al. (1988, §§8.2.6, 9.2.1) and Fang and Shriner (1992); evaluation of the generalized hypergeometric functions of unit argument that represent these symbols, see Srinivasa Rao and Venkatesh (1978) and Srinivasa Rao (1981).
►For symbols, methods include evaluation of the single-sum series (34.6.2), see Fang and Shriner (1992); evaluation of triple-sum series, see Varshalovich et al. (1988, §10.2.1) and Srinivasa Rao et al. (1989).
…
13: 34.7 Basic Properties: Symbol
§34.7 Basic Properties: Symbol
… ►§34.7(ii) Symmetry
… ►§34.7(iv) Orthogonality
… ►§34.7(vi) Sums
… ►It constitutes an addition theorem for the symbol. …14: 3.3 Interpolation
…
►where is a simple closed contour in described in the positive rotational sense and enclosing the points .
…
►and are the Lagrangian interpolation coefficients defined by
…
►where is given by (3.3.3), and is a simple closed contour in described in the positive rotational sense and enclosing .
…
►By using this approximation to as a new point, , and evaluating , we find that , with 9 correct digits.
…
►Then by using in Newton’s interpolation formula, evaluating and recomputing , another application of Newton’s rule with starting value gives the approximation , with 8 correct digits.
…
15: 16.24 Physical Applications
…
►
§16.24(iii) , , and Symbols
… ►They can be expressed as functions with unit argument. …These are balanced functions with unit argument. Lastly, special cases of the symbols are functions with unit argument. …16: 19.37 Tables
…
►Tabulated for , to 10D by Fettis and Caslin (1964).
►Tabulated for , to 7S by Beli͡akov et al. (1962).
…
►Tabulated for , to 10D by Fettis and Caslin (1964).
►Tabulated for , to 6D by Byrd and Friedman (1971), for , and to 8D by Abramowitz and Stegun (1964, Chapter 17), and for , to 9D by Zhang and Jin (1996, pp. 674–675).
…
►Tabulated for , , to 10D by Fettis and Caslin (1964) (and warns of inaccuracies in Selfridge and Maxfield (1958) and Paxton and Rollin (1959)).
…
17: 34.1 Special Notation
…
►
►
►The main functions treated in this chapter are the Wigner symbols, respectively,
…
►For other notations for , , symbols, see Edmonds (1974, pp. 52, 97, 104–105) and Varshalovich et al. (1988, §§8.11, 9.10, 10.10).
| nonnegative integers. | |
| … | |
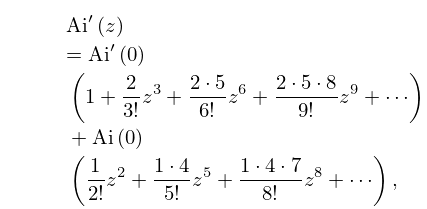
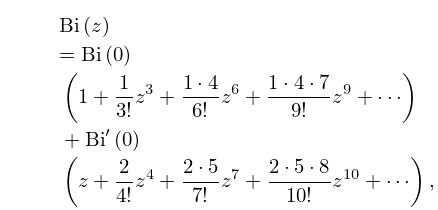
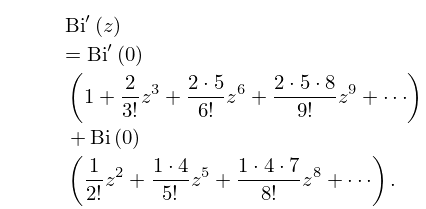
18: 9.4 Maclaurin Series
19: 3.2 Linear Algebra
…
►Assume that can be factored as in (3.2.5), but without partial pivoting.
…
►where is the largest of the absolute values of the eigenvalues of the matrix ; see §3.2(iv).
…
►is called the characteristic polynomial of and its zeros are the eigenvalues of .
…
►has the same eigenvalues as .
…
►Many methods are available for computing eigenvalues; see Golub and Van Loan (1996, Chapters 7, 8), Trefethen and Bau (1997, Chapter 5), and Wilkinson (1988, Chapters 8, 9).

{kind=link}
{kind=link}
{kind=link}
{kind=link}