§3.3 Interpolation
Contents
- §3.3(i) Lagrange Interpolation
- §3.3(ii) Lagrange Interpolation with Equally-Spaced Nodes
- §3.3(iii) Divided Differences
- §3.3(iv) Newton’s Interpolation Formula
- §3.3(v) Inverse Interpolation
- §3.3(vi) Other Interpolation Methods
§3.3(i) Lagrange Interpolation
The nodes or abscissas are real or complex; function values are . Given distinct points and corresponding function values , the Lagrange interpolation polynomial is the unique polynomial of degree not exceeding such that , . It is given by
| 3.3.1 | |||
where
| 3.3.2 | ||||
Here the prime signifies that the factor for is to be omitted, is the Kronecker symbol, and is the nodal polynomial
| 3.3.3 | |||
and the weights are
| 3.3.3_1 | |||
The final expression in (3.3.1) is the Barycentric form of the Lagrange interpolation formula. It is a direct consequence of the identity
| 3.3.3_2 | |||
and according to Berrut and Trefethen (2004) it is the most efficient representation of .
With an error term the Lagrange interpolation formula for is given by
| 3.3.4 | |||
If , (), and the nodes are real, and is continuous on the smallest closed interval containing , then the error can be expressed
| 3.3.5 | |||
for some . If is analytic in a simply-connected domain (§1.13(i)), then for ,
| 3.3.6 | |||
where is a simple closed contour in described in the positive rotational sense and enclosing the points .
§3.3(ii) Lagrange Interpolation with Equally-Spaced Nodes
The -point formula (3.3.4) can be written in the form
| 3.3.7 | |||
| , | |||
where the nodes () and function are real,
| 3.3.8 | ||||
| 3.3.9 | |||
and are the Lagrangian interpolation coefficients defined by
| 3.3.10 | |||
Let be defined by
| 3.3.12 | |||
where the maximum is taken over -intervals given in the formulas below. Then for these -intervals,
| 3.3.13 | |||
Linear Interpolation
| 3.3.14 | ||||
| , | ||||
| 3.3.15 | ||||
| . | ||||
Three-Point Formula
| 3.3.16 | |||
| , | |||
| 3.3.17 | ||||
| 3.3.18 | |||
| . | |||
Four-Point Formula
| 3.3.19 | |||
| , | |||
| 3.3.20 | ||||
| 3.3.21 | |||
Five-Point Formula
| 3.3.22 | |||
| , | |||
| 3.3.23 | ||||
| 3.3.24 | |||
Six-Point Formula
| 3.3.25 | |||
| , | |||
| 3.3.26 | ||||
| 3.3.27 | |||
Seven-Point Formula
| 3.3.28 | |||
| , | |||
| 3.3.29 | ||||
| 3.3.30 | |||
Eight-Point Formula
| 3.3.31 | |||
| , | |||
| 3.3.32 | ||||
| 3.3.33 | |||
§3.3(iii) Divided Differences
The divided differences of relative to a sequence of distinct points are defined by
| 3.3.34 | ||||
and so on. Explicitly, the divided difference of order is given by
| 3.3.35 | |||
If and the () are real, and is times continuously differentiable on a closed interval containing the , then
| 3.3.36 | |||
and again is as in §3.3(i). If is analytic in a simply-connected domain , then for ,
| 3.3.37 | |||
where is given by (3.3.3), and is a simple closed contour in described in the positive rotational sense and enclosing .
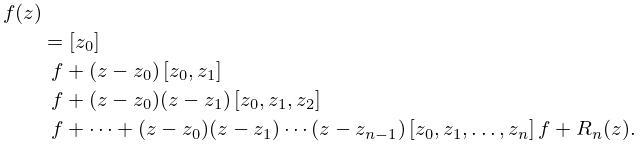
§3.3(iv) Newton’s Interpolation Formula
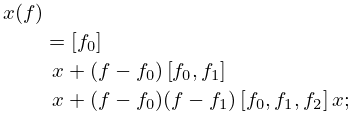
This represents the Lagrange interpolation polynomial in terms of divided differences:
| 3.3.38 | |||
The interpolation error is as in §3.3(i). Newton’s formula has the advantage of allowing easy updating: incorporation of a new point requires only addition of the term with to (3.3.38), plus the computation of this divided difference. Another advantage is its robustness with respect to confluence of the set of points . For example, for coincident points the limiting form is given by .
§3.3(v) Inverse Interpolation
In this method we interchange the roles of the points and the function values . It can be used for solving a nonlinear scalar equation approximately. Another approach is to combine the methods of §3.8 with direct interpolation and §3.4.
Example
To compute the first negative zero of the Airy function (§9.2). The inverse interpolation polynomial is given by
| 3.3.39 | |||
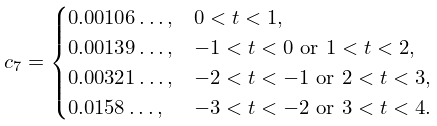
compare (3.3.38). With , , , we obtain
| 3.3.40 | |||
and with we find that , with 4 correct digits. By using this approximation to as a new point, , and evaluating , we find that , with 9 correct digits.
For comparison, we use Newton’s interpolation formula (3.3.38)
| 3.3.41 | |||
with the derivative
| 3.3.42 | |||
and compute an approximation to by using Newton’s rule (§3.8(ii)) with starting value . This gives the new point . Then by using in Newton’s interpolation formula, evaluating and recomputing , another application of Newton’s rule with starting value gives the approximation , with 8 correct digits.
§3.3(vi) Other Interpolation Methods
For Hermite interpolation, trigonometric interpolation, spline interpolation, rational interpolation (by using continued fractions), interpolation based on Chebyshev points, and bivariate interpolation, see Bulirsch and Rutishauser (1968), Davis (1975, pp. 27–31), and Mason and Handscomb (2003, Chapter 6). These references also describe convergence properties of the interpolation formulas.
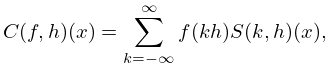
For interpolation of a bounded function on the cardinal function of is defined by
| 3.3.43 | |||
where
| 3.3.44 | |||
is called the Sinc function. For theory and applications see Stenger (1993, Chapter 3).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}