§16.5 Integral Representations and Integrals
When and , ,
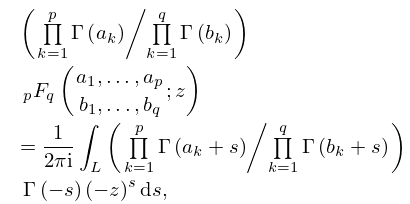
| 16.5.1 | |||
where the contour of integration separates the poles of , , from those of .
Suppose first that is a contour that starts at infinity on a line parallel to the positive real axis, encircles the nonnegative integers in the negative sense, and ends at infinity on another line parallel to the positive real axis. Then the integral converges when provided that , or when provided that , and provides an integral representation of the left-hand side with these conditions.
Secondly, suppose that is a contour from to . Then the integral converges when and . In the case the left-hand side of (16.5.1) is an entire function, and the right-hand side supplies an integral representation valid when . In the case the right-hand side of (16.5.1) supplies the analytic continuation of the left-hand side from the open unit disk to the sector ; compare §16.2(iii). Lastly, when the right-hand side of (16.5.1) can be regarded as the definition of the (customarily undefined) left-hand side. In this event, the formal power-series expansion of the left-hand side (obtained from (16.2.1)) is the asymptotic expansion of the right-hand side as in the sector , where is an arbitrary small positive constant.
Next, when ,
| 16.5.2 | |||
| , | |||
| 16.5.3 | |||
| , , | |||
| 16.5.4 | |||
| , . | |||
In (16.5.2)–(16.5.4) all many-valued functions in the integrands assume their principal values, and all integration paths are straight lines.
(16.5.2) also holds when , provided that . In (16.5.3) the restriction can be removed when . (16.5.4) also holds when , provided that . Lastly, the restrictions on the parameters can be eased by replacing the integration paths with loop contours; see Luke (1969a, §3.6).
Laplace transforms and inverse Laplace transforms of generalized hypergeometric functions are given in Prudnikov et al. (1992a, §3.38) and Prudnikov et al. (1992b, §3.36). For further integral representations and integrals see Apelblat (1983, §16), Erdélyi et al. (1953a, §4.6), Erdélyi et al. (1954a, §§6.9 and 7.5), Luke (1969a, §3.6), and Prudnikov et al. (1990, §§2.22, 4.2.4, and 4.3.1).

{kind=link}
{kind=link}
{kind=link}
{kind=link}