partial
(0.000 seconds)
31—40 of 95 matching pages
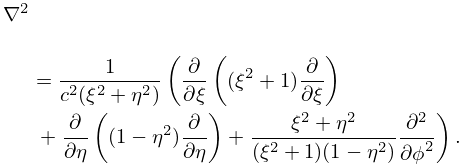
31: 30.14 Wave Equation in Oblate Spheroidal Coordinates
…
►
30.14.6
…
32: 1.9 Calculus of a Complex Variable
…
►
►
…
►Conversely, if at a given point the partial derivatives , , , and exist, are continuous, and satisfy (1.9.25), then is differentiable at .
…
►
1.9.26
…
►
1.9.27
…
33: 23.15 Definitions
…
►
23.15.8
…
34: 21.7 Riemann Surfaces
35: 24.20 Tables
…
►In Wagstaff (2002) these results are extended to and , respectively, with further complete and partial factorizations listed up to and , respectively.
…
36: Mark J. Ablowitz
…
►Widespread interest in Painlevé equations re-emerged in the 1970s and thereafter partially due to the connection with IST and integrable systems.
…
37: Bonita V. Saunders
…
►Her research interests include numerical grid generation, numerical solution of partial differential equations, and visualization of special functions.
…
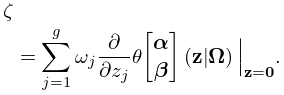
38: 31.9 Orthogonality
…
►
31.9.3
…
39: 36.11 Leading-Order Asymptotics
…
►
36.11.2
…
40: 35.7 Gaussian Hypergeometric Function of Matrix Argument
…
►
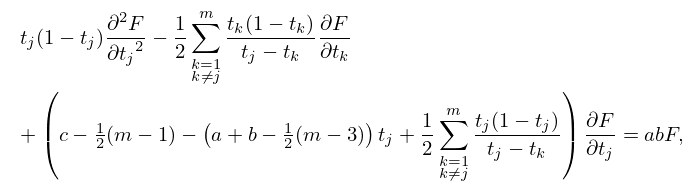
§35.7(iii) Partial Differential Equations
… ►Subject to the conditions (a)–(c), the function is the unique solution of each partial differential equation ►
35.7.9
…
►Systems of partial differential equations for the (defined in §35.8) and functions of matrix argument can be obtained by applying (35.8.9) and (35.8.10) to (35.7.9).
…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}