§21.7 Riemann Surfaces
Contents
- §21.7(i) Connection of Riemann Theta Functions to Riemann Surfaces
- §21.7(ii) Fay’s Trisecant Identity
- §21.7(iii) Frobenius’ Identity
§21.7(i) Connection of Riemann Theta Functions to Riemann Surfaces
In almost all applications, a Riemann theta function is associated with a compact Riemann surface. Although there are other ways to represent Riemann surfaces (see e.g. Belokolos et al. (1994, §2.1)), they are obtainable from plane algebraic curves (Springer (1957), or Riemann (1851)). Consider the set of points in that satisfy the equation
| 21.7.1 | |||
where is a polynomial in and that does not factor over . Equation (21.7.1) determines a plane algebraic curve in , which is made compact by adding its points at infinity. To accomplish this we write (21.7.1) in terms of homogeneous coordinates:
| 21.7.2 | |||
by setting , , and then clearing fractions. This compact curve may have singular points, that is, points at which the gradient of vanishes. Removing the singularities of this curve gives rise to a two-dimensional connected manifold with a complex-analytic structure, that is, a Riemann surface. All compact Riemann surfaces can be obtained this way.
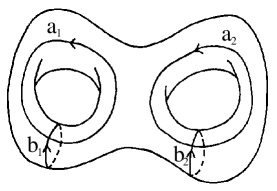
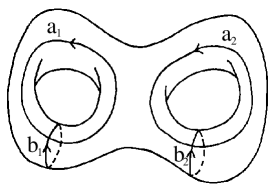
Since a Riemann surface is a two-dimensional manifold that is orientable (owing to its analytic structure), its only topological invariant is its genus (the number of handles in the surface). On this surface, we choose cycles (that is, closed oriented curves, each with at most a finite number of singular points) , , , such that their intersection indices satisfy
| 21.7.3 | ||||
For example, Figure 21.7.1 depicts a genus 2 surface.
On a Riemann surface of genus , there are linearly independent holomorphic differentials , . If a local coordinate is chosen on the Riemann surface, then the local coordinate representation of these holomorphic differentials is given by
| 21.7.4 | |||
| , | |||
where , are analytic functions. Thus the differentials , have no singularities on . Note that for the purposes of integrating these holomorphic differentials, all cycles on the surface are a linear combination of the cycles , , . The are normalized so that
| 21.7.5 | |||
| . | |||
Then the matrix defined by
| 21.7.6 | |||
| , | |||
is a Riemann matrix and it is used to define the corresponding Riemann theta function. In this way, we associate a Riemann theta function with every compact Riemann surface .
Riemann theta functions originating from Riemann surfaces are special in the sense that a general -dimensional Riemann theta function depends on complex parameters. In contrast, a -dimensional Riemann theta function arising from a compact Riemann surface of genus () depends on at most complex parameters (one complex parameter for the case ). These special Riemann theta functions satisfy many special identities, two of which appear in the following subsections. For more information, see Dubrovin (1981), Brieskorn and Knörrer (1986, §9.3), Belokolos et al. (1994, Chapter 2), and Mumford (1984, §2.2–2.3).
§21.7(ii) Fay’s Trisecant Identity
Let , be such that
| 21.7.7 | |||
Define the holomorphic differential
| 21.7.8 | |||
Then the prime form on the corresponding compact Riemann surface is defined by
| 21.7.9 | |||
where and are points on , , and the path of integration on from to is identical for all components. Here is such that , . Either branch of the square roots may be chosen, as long as the branch is consistent across . For all , and all , , , on , Fay’s identity is given by
| 21.7.10 | |||
§21.7(iii) Frobenius’ Identity
Let be a hyperelliptic Riemann surface. These are Riemann surfaces that may be obtained from algebraic curves of the form
| 21.7.11 | |||
where is a polynomial in of odd degree . The genus of this surface is . The zeros , of specify the finite branch points , that is, points at which , on the Riemann surface. Denote the set of all branch points by . Consider a fixed subset of , such that the number of elements in the set is , and . Next, define an isomorphism which maps every subset of with an even number of elements to a -dimensional vector with elements either or . Define the operation
| 21.7.12 | |||
Also, , , and . Then the isomorphism is determined completely by:
| 21.7.13 | |||
| 21.7.14 | |||
| 21.7.15 | |||
| 21.7.16 | |||
Furthermore, let and . Then for all , , such that , and for all , , such that and , we have Frobenius’ identity:
| 21.7.17 | |||

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}