of matrices
(0.000 seconds)
11—20 of 41 matching pages
11: 21.1 Special Notation
…
►
►
…
►Uppercase boldface letters are real or complex matrices.
…
| positive integers. | |
| … | |
| set of all matrices with integer elements. | |
| … | |
12: 35.2 Laplace Transform
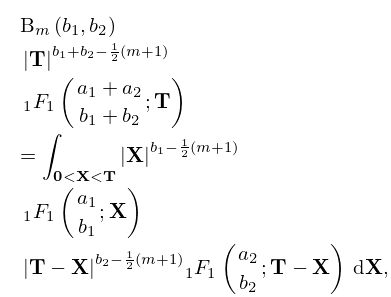
13: 21.6 Products
…
►
21.6.1
►that is, is the set of all
matrices that are obtained by premultiplying by any matrix with integer elements; two such matrices in are considered equivalent if their difference is a matrix with integer elements.
…
►
21.6.3
…
►
21.6.4
…
14: 35.4 Partitions and Zonal Polynomials
15: 1.3 Determinants, Linear Operators, and Spectral Expansions
…
►
Determinants of Upper/Lower Triangular and Diagonal Matrices
… ►§1.3(iv) Matrices as Linear Operators
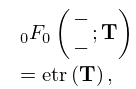
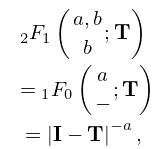
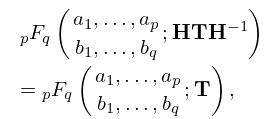
… ►Real symmetric () and Hermitian () matrices are self-adjoint operators on . … ►For Hermitian matrices is unitary, and for real symmetric matrices is an orthogonal transformation. …16: 35.6 Confluent Hypergeometric Functions of Matrix Argument
17: 19.31 Probability Distributions
…
►More generally, let () and () be real positive-definite matrices with rows and columns, and let be the eigenvalues of .
…
18: 28.34 Methods of Computation
…
►
(d)
…
19: Philip J. Davis
…
►This immediately led to discussions among some of the project members about what might be possible, and the discovery that some interactive graphics work had already been done for the NIST Matrix Market, a publicly available repository of test matrices for comparing the effectiveness of numerical linear algebra algorithms.
…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}