§21.6 Products
Contents
§21.6(i) Riemann Identity
Let be an arbitrary orthogonal matrix (that is, ) with rational elements. Also, let be an arbitrary matrix. Define
| 21.6.1 | |||
that is, is the set of all matrices that are obtained by premultiplying by any matrix with integer elements; two such matrices in are considered equivalent if their difference is a matrix with integer elements. Also, let
| 21.6.2 | |||
that is, is the number of elements in the set containing all -dimensional vectors obtained by multiplying on the right by a vector with integer elements. Two such vectors are considered equivalent if their difference is a vector with integer elements. Then
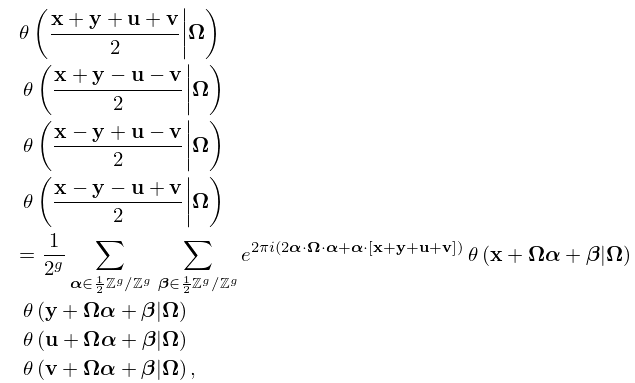
| 21.6.3 | |||
where , , denote respectively the th columns of , , . This is the Riemann identity. On using theta functions with characteristics, it becomes
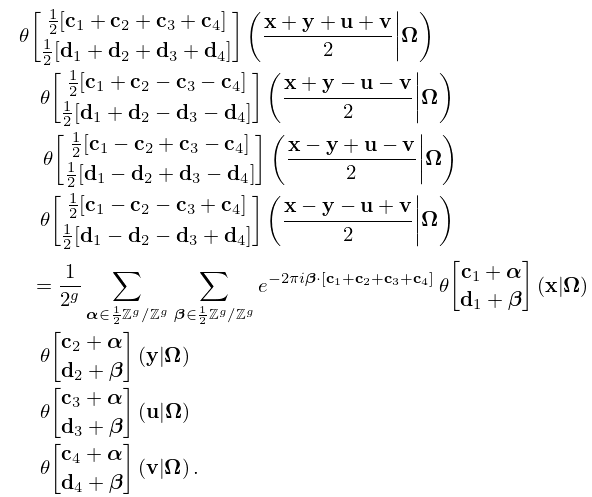
| 21.6.4 | |||
where and are arbitrary -dimensional vectors. Many identities involving products of theta functions can be established using these formulas.
Example
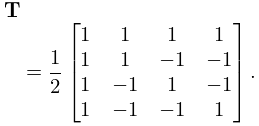
Let and
| 21.6.5 | |||
Then
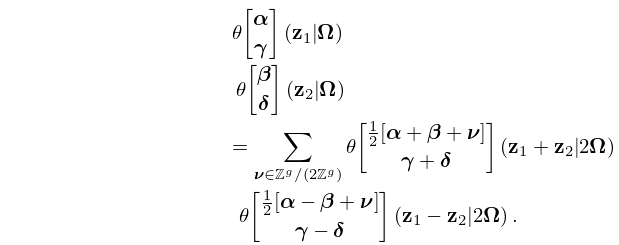
| 21.6.6 | |||
and
| 21.6.7 | |||

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}