§15.11 Riemann’s Differential Equation
Contents
§15.11(i) Equations with Three Singularities
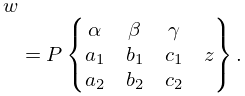
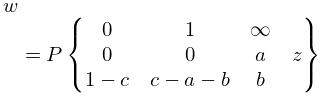
The importance of (15.10.1) is that any homogeneous linear differential equation of the second order with at most three distinct singularities, all regular, in the extended plane can be transformed into (15.10.1). The most general form is given by
| 15.11.1 | |||
with
| 15.11.2 | |||
Here , , are the exponent pairs at the points , , , respectively. Cases in which there are fewer than three singularities are included automatically by allowing the choice for exponent pairs. Also, if any of , , , is at infinity, then we take the corresponding limit in (15.11.1).
§15.11(ii) Transformation Formulas
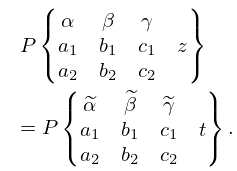
A conformal mapping of the extended complex plane onto itself has the form
| 15.11.5 | |||
where , , , are real or complex constants such that . These constants can be chosen to map any two sets of three distinct points and onto each other. Symbolically:
| 15.11.6 | |||
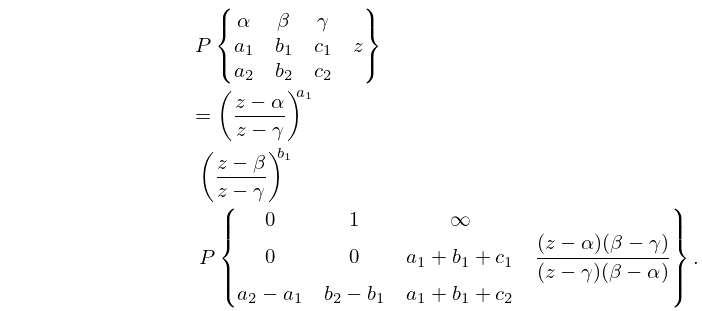
The reduction of a general homogeneous linear differential equation of the second order with at most three regular singularities to the hypergeometric differential equation is given by
| 15.11.7 | |||
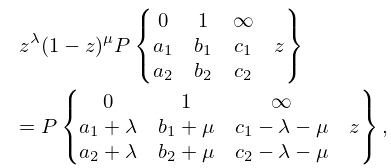
We also have
| 15.11.8 | |||
for arbitrary and .

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}