rotation matrices
(0.001 seconds)
11—20 of 70 matching pages
11: 16.24 Physical Applications
…
►The symbols, or Clebsch–Gordan coefficients, play an important role in the decomposition of reducible representations of the rotation group into irreducible representations.
…
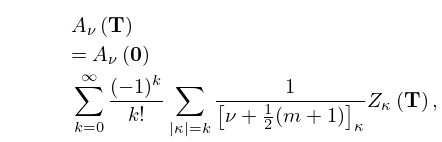
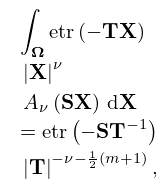
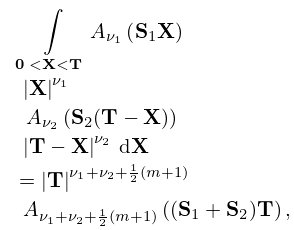
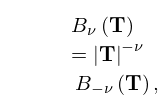
12: 35.5 Bessel Functions of Matrix Argument
13: 1.2 Elementary Algebra
…
►
Multiplication of Matrices
… ►§1.2(vi) Square Matrices
… ►Special Forms of Square Matrices
… ►Norms of Square Matrices
… ►Non-Defective Square Matrices
…14: 29.18 Mathematical Applications
…
►
§29.18(iv) Other Applications
… ►Patera and Winternitz (1973) finds bases for the rotation group.15: 4.29 Graphics
…
►The conformal mapping is obtainable from Figure 4.15.7 by rotating both the -plane and the -plane through an angle , compare (4.28.8).
…
16: 35.3 Multivariate Gamma and Beta Functions
17: Bille C. Carlson
…
►In theoretical physics he is known for the “Carlson-Keller Orthogonalization”, published in 1957, Orthogonalization Procedures and the Localization of Wannier Functions, and the “Carlson-Keller Theorem”, published in 1961, Eigenvalues of Density Matrices.
…
18: 21.1 Special Notation
…
►
►
…
►Uppercase boldface letters are real or complex matrices.
…
| positive integers. | |
| … | |
| set of all matrices with integer elements. | |
| … | |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}