angle between arcs
(0.002 seconds)
1—10 of 96 matching pages
1: 4.42 Solution of Triangles
2: 1.9 Calculus of a Complex Variable
…
►and when ,
…
►
Conformal Transformation
… ►The angle between and at is the angle between the tangents to the two arcs at , that is, the difference of the signed angles that the tangents make with the positive direction of the real axis. If , then the angle between and equals the angle between and both in magnitude and sense. We then say that the mapping is conformal (angle-preserving) at . …3: 31.16 Mathematical Applications
…
►Expansions of Heun polynomial products in terms of Jacobi polynomial (§18.3) products are derived in Kalnins and Miller (1991a, b, 1993) from the viewpoint of interrelation between two bases in a Hilbert space:
►
31.16.1
…
►
4: 7.20 Mathematical Applications
…
►Then the arc length between the origin and equals , and is directly proportional to the curvature at , which equals .
Furthermore, because , the angle between the -axis and the tangent to the spiral at is given by .
…
5: 1.6 Vectors and Vector-Valued Functions
…
►
Magnitude and Angle of Vector
… ►
1.6.4
►
is the angle between
and .
…
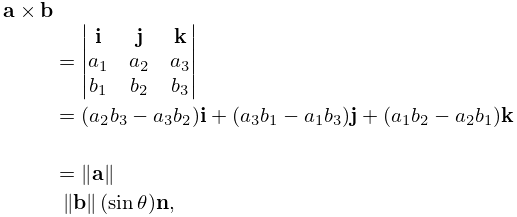
►
1.6.9
…
►For a sphere , , ,
…
6: 19.11 Addition Theorems
7: 20.15 Tables
…
►This reference gives , , and their logarithmic -derivatives to 4D for , , where is the modular angle given by
►
20.15.1
…
8: 28.27 Addition Theorems
…
►Addition theorems provide important connections between Mathieu functions with different parameters and in different coordinate systems.
…
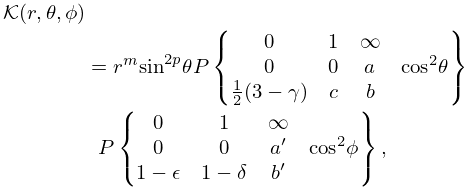
9: 31.10 Integral Equations and Representations
…
►
31.10.8
…
►
31.10.9
…
►A further change of variables, to spherical coordinates,
…
►
31.10.21
…
►
31.10.22
…
10: Simon Ruijsenaars
…
►His main research interests cover integrable systems, special functions, analytic difference equations, classical and quantum mechanics, and the relations between these areas.
…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}