§1.6 Vectors and Vector-Valued Functions
Contents
- §1.6(i) Vectors
- §1.6(ii) Vectors: Alternative Notations
- §1.6(iii) Vector-Valued Functions
- §1.6(iv) Path and Line Integrals
- §1.6(v) Surfaces and Integrals over Surfaces
§1.6(i) Vectors
| 1.6.1 | ||||
Dot Product (or Scalar Product)
| 1.6.2 | |||
Magnitude and Angle of Vector
| 1.6.3 | |||
| 1.6.4 | |||
is the angle between and .
Unit Vectors
| 1.6.5 | ||||
| 1.6.6 | |||
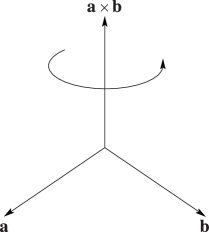
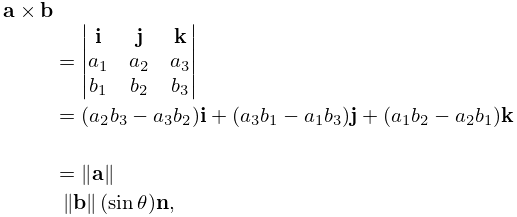
Cross Product (or Vector Product)
| 1.6.7 | ||||
| 1.6.8 | ||||
| 1.6.9 | |||
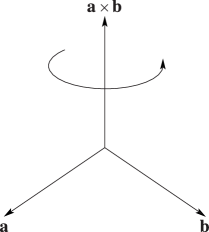
where is the unit vector normal to and whose direction is determined by the right-hand rule; see Figure 1.6.1.
Area of parallelogram with vectors and as sides .
Volume of a parallelepiped with vectors , , and as edges .
| 1.6.10 | ||||
| 1.6.11 | ||||
§1.6(ii) Vectors: Alternative Notations
The following notations are often used in the physics literature; see for example Lorentz et al. (1923, pp. 122–123).
Einstein Summation Convention
Much vector algebra involves summation over suffices of products of vector components. In almost all cases of repeated suffices, we can suppress the summation notation entirely, if it is understood that an implicit sum is to be taken over any repeated suffix. Thus pairs of indefinite suffices in an expression are resolved by being summed over (or “traced” over).
Example
| 1.6.12 | |||
Levi-Civita Symbol
| 1.6.14 | |||
Examples
Lastly, the volume of a parallelepiped with vectors , , and as edges is .
§1.6(iii) Vector-Valued Functions
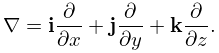
Del Operator
| 1.6.19 | |||
The gradient of a differentiable scalar function is
| 1.6.20 | |||
The divergence of a differentiable vector-valued function is
| 1.6.21 | |||
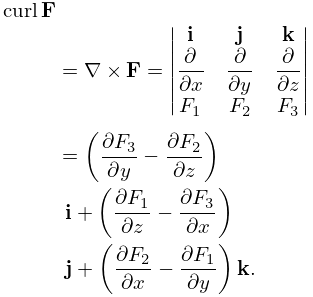
The curl of is
| 1.6.22 | |||
| 1.6.23 | |||
| 1.6.24 | |||
| 1.6.25 | |||
| 1.6.26 | |||
| 1.6.27 | |||
| 1.6.28 | |||
| 1.6.29 | |||
| 1.6.30 | |||
| 1.6.31 | |||
| 1.6.32 | |||
| 1.6.33 | |||
| 1.6.34 | |||
§1.6(iv) Path and Line Integrals
Note: The terminology open and closed sets and boundary points in the plane that is used in this subsection and §1.6(v) is analogous to that introduced for the complex plane in §1.9(ii).
A path is defined by , with ranging over an interval and differentiable. Letting
| 1.6.35 | |||
then the length of a path for is
| 1.6.36 | |||
The path integral of a continuous function is
| 1.6.37 | |||
The line integral of a vector-valued function along is given by
| 1.6.38 | |||
A path , , is a reparametrization of , , if and with differentiable and monotonic. If and , then the reparametrization is called orientation-preserving, and
| 1.6.39 | |||
If and , then the reparametrization is orientation-reversing and
| 1.6.40 | |||
In either case
| 1.6.41 | |||
when is continuous, and
| 1.6.42 | |||
when is continuously differentiable.
The geometrical image of a path is called a simple closed curve if is one-to-one, with the exception . The curve is piecewise differentiable if is piecewise differentiable. Note that can be given an orientation by means of .
Green’s Theorem
Let
| 1.6.43 | |||
and be the closed and bounded point set in the plane having a simple closed curve as boundary. If is oriented in the positive (anticlockwise) sense, then
| 1.6.44 | |||
Sufficient conditions for this result to hold are that and are continuously differentiable on , and is piecewise differentiable.
The area of can be found from (1.6.44) by taking , , or .
§1.6(v) Surfaces and Integrals over Surfaces
A parametrized surface is defined by
| 1.6.45 | |||
with , an open set in the plane.
For , , and continuously differentiable, the vectors
| 1.6.46 | |||
and
| 1.6.47 | |||
are tangent to the surface at . The surface is smooth at this point if . A surface is smooth if it is smooth at every point. The vector at is normal to the surface at .
The area of a parametrized smooth surface is given by
| 1.6.48 | |||
and
| 1.6.49 | |||
The area is independent of the parametrizations.
For a sphere , , ,
| 1.6.50 | |||
For a surface ,
| 1.6.51 | |||
For a surface of revolution, , , about the -axis,
| 1.6.52 | |||
and about the -axis,
| 1.6.53 | |||
The integral of a continuous function over a surface is
| 1.6.54 | |||
For a vector-valued function ,
| 1.6.55 | |||
where is the surface element with an attached normal direction .
A surface is orientable if a continuously varying normal can be defined at all points of the surface. An orientable surface is oriented if suitable normals have been chosen. A parametrization of an oriented surface is orientation preserving if has the same direction as the chosen normal at each point of , otherwise it is orientation reversing.
If and are both orientation preserving or both orientation reversing parametrizations of defined on open sets and respectively, then
| 1.6.56 | |||
otherwise, one is the negative of the other.
Stokes’s Theorem
Suppose is an oriented surface with boundary which is oriented so that its direction is clockwise relative to the normals of . Then
| 1.6.57 | |||
when is a continuously differentiable vector-valued function.
Gauss’s (or Divergence) Theorem
Suppose is a piecewise smooth surface which forms the complete boundary of a bounded closed point set , and is oriented by its normal being outwards from . Then
| 1.6.58 | |||
when is a continuously differentiable vector-valued function.
Green’s Theorem (for Volume)
For and twice-continuously differentiable functions
| 1.6.59 | |||
and
| 1.6.60 | |||
where is the derivative of normal to the surface outwards from and is the unit outer normal vector.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}