…
►For the polynomial of degree 7, for example, is
…
►All cases of , , , and are computed by essentially the same procedure (after transforming Cauchy principal values by means of (19.20.14) and (19.2.20)).
…
►The incomplete integrals and can be computed by successive transformations in which two of the three variables converge quadratically to a common value and the integrals reduce to , accompanied by two quadratically convergent series in the case of ; compare Carlson (1965, §§5,6).
…
►
can be evaluated by using (19.25.5).
…A summary for is given in Gautschi (1975, §3).
…
…
►If is analytic in a simply-connected domain (§1.13(i)), then for ,
…where is a simple closed contour in described in the positive rotational sense and enclosing the points .
…
►where is given by (3.3.3), and is a simple closed contour in described in the positive rotational sense and enclosing .
…
►By using this approximation to as a new point, , and evaluating , we find that , with 9 correct digits.
…
►Then by using in Newton’s interpolation formula, evaluating and recomputing , another application of Newton’s rule with starting value gives the approximation , with 8 correct digits.
…
Abramowitz and Stegun (1964, Chapter 8) tabulates for
, , 5–8D; for
, , 5–7D; and
for , , 6–8D;
and for ,
, 6S; and for
, , 6S.
(Here primes denote derivatives with respect to .)
Zhang and Jin (1996, Chapter 4) tabulates for
, , 7D; for
, , 8D; for
, , 8S; for
, , 8D; for
, , , , 8S; for
, , 8S; for
, , , 5D;
for , , 7S;
for , , 8S. Corresponding values of the derivative of
each function are also included, as are 6D values of the first 5 -zeros of
and of its derivative for ,
.
W. J. Thompson (1994)Angular Momentum: An Illustrated Guide to Rotational Symmetries for Physical Systems.
A Wiley-Interscience Publication, John Wiley & Sons Inc., New York.
ⓘ
Notes:
With 1 Macintosh floppy disk (3.5 inch; DD).
Programs for the calculation of symbols
are included.
A. Trellakis, A. T. Galick, and U. Ravaioli (1997)Rational Chebyshev approximation for the Fermi-Dirac integral
.
Solid–State Electronics41 (5), pp. 771–773.
G. E. Andrews and R. Askey (1985)Classical Orthogonal Polynomials.
In Orthogonal Polynomials and Applications, C. Brezinski, A. Draux, A. P. Magnus, P. Maroni, and A. Ronveaux (Eds.),
Lecture Notes in Math., Vol. 1171, pp. 36–62.
…
►In (18.5.4_5) see §26.11 for the Fibonacci numbers .
…
►In this equation is as in Table 18.3.1, (reproduced in Table 18.5.1), and , are as in Table 18.5.1.
…
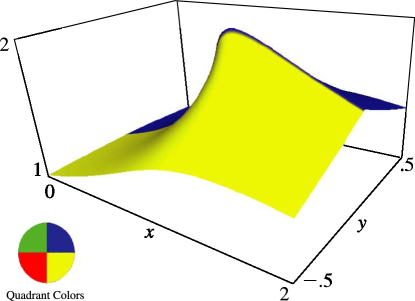
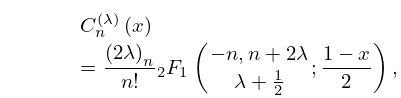
►For the definitions of , , and see §16.2.
…
►
…
►The are the differentiated Lagrangian interpolation coefficients:
…where is as in (3.3.10).
…
►
…
►where is a simple closed contour described in the positive rotational sense such that and its interior lie in the domain of analyticity of , and is interior to .
Taking to be a circle of radius centered at , we obtain
…
 ►
►
 ►
►
 ►
►
 ►
►
 ►
►

{kind=link}