as eigenfunctions of a q-difference operator
(0.005 seconds)
41—50 of 892 matching pages
41: 17.2 Calculus
…
►
…
►Note that (17.2.6_1) is just (27.14.14) with and .
…
►When , where is a nonnegative integer, (17.2.37) reduces to the -binomial series
…
►If is continuous on , then
…
►These identities are the first in a large collection of similar results.
…
42: 30.4 Functions of the First Kind
43: 18.1 Notation
…
►
-Differences
►Forward differences: … ►Backward differences: … ►Central differences in imaginary direction: … ►In Koekoek et al. (2010) denotes the operator .44: Philip J. Davis
…
►He returned to Harvard after the war and completed a Ph.
…
►At that time John Todd was Chief of the Numerical Analysis Section of the Applied Mathematics Division and head of the Computation Laboratory that co-developed, with the NBS Electronic Computer Laboratory, the Standards Eastern Automatic Computer (SEAC), the first fully operational stored-program electronic digital computer in the United States.
…
►” Davis believed it was the first chapter written, and he laid out a schema that could serve as a model for the other chapters.
Davis also co-authored a second Chapter, “Numerical Interpolation, Differentiation, and Integration” with Ivan Polonsky.
…
►Moreover, a cutting plane feature allows users to track curves of intersection produced as a moving plane cuts through the function surface.
…
45: 1.4 Calculus of One Variable
…
►A function is square-integrable if
…
►If , then is of bounded
variation on .
In this case, and are nondecreasing bounded functions and .
…
►Lastly, whether or not the real numbers and satisfy , and whether or not they are finite, we define
by (1.4.34) whenever this integral exists.
…
►A function is convex on if
…
46: 16.21 Differential Equation
…
►
satisfies the differential equation
►
16.21.1
…
►With the classification of §16.8(i), when the only singularities of (16.21.1) are a regular singularity at and an irregular singularity at .
…
►A fundamental set of solutions of (16.21.1) is given by
►
16.21.2
.
…
47: 17.6 Function
…
►For a similar result for -confluent hypergeometric functions see Morita (2013).
…
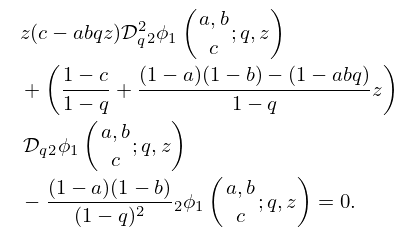
►
Iterations of
… ►
17.6.27
►(17.6.27) reduces to the hypergeometric equation (15.10.1) with the substitutions , , , followed by .
…
►where , , and the contour of integration separates the poles of from those of , and the infimum of the distances of the poles from the contour is positive.
…
48: 1.15 Summability Methods
…
►(Here and elsewhere in this subsection is a constant such that .)
…
►
is a harmonic function in polar coordinates (1.9.27), and
…
►The lower limit of the integral in (1.15.47) can be replaced by any constant .
Also, we can replace the lower and upper limits of the integral by and , respectively.
…
►and either or , then
…
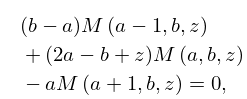
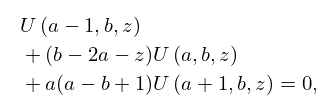
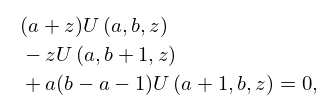
49: 13.3 Recurrence Relations and Derivatives
…
►
13.3.1
…
►
13.3.7
…
►
13.3.11
►
13.3.12
…
►Other versions of several of the identities in this subsection can be constructed with the aid of the operator identity
…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}