…
►A path is defined by , with ranging over an interval and differentiable.
…then the length of a path for is
…The path integral of a continuous function is
…If and , then the reparametrization is orientation-reversing and
…
…
►
takes its principal value where the path intersects the positive real axis, and is continuous elsewhere on the path.
…where the integration path passes above or below the pole at , according as upper or lower signs are taken.
…
►In (8.6.10)–(8.6.12), is a real constant and the path of integration is indented (if necessary) so that in the case of (8.6.10) it separates the poles of the gamma function from the pole at , in the case of (8.6.11) it is to the right of all poles, and in the case of (8.6.12) it separates the poles of the gamma function from the poles at .
…
…
►In the singular limit , the functions , , become integral kernels of Feynman path integrals (distribution-valued Green’s functions); see Schulman (1981, pp. 194–195).
…
…
►By considering, as a group, all analytic transformations of a basis of solutions under analytic continuation around all paths on the Riemann sheet, we obtain the monodromy group.
…
…
►where the integration path
separates the poles of the factors from those of the factors .
…
►
…
Figure 16.17.1: s-plane.
Path
for the integral representation (16.17.1) of the Meijer -function.
…
…
►To insure stability the integration path must be chosen so that as we proceed along it the wanted solution grows in magnitude at least as rapidly as the complementary solutions.
…
…
►If is analytic in a sector containing , then the region of validity may be increased by rotation of the integration paths.
…
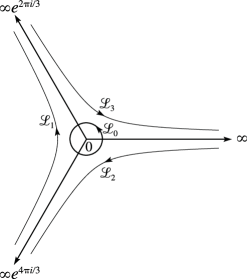
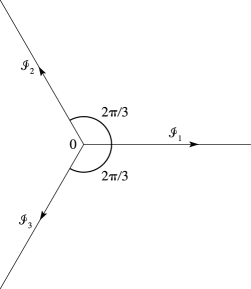
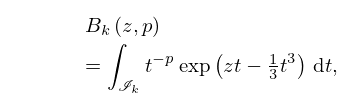
►Let denote the path for the contour integral
…
►Cases in which are usually handled by deforming the integration path in such a way that the minimum of is attained at a saddle point or at an endpoint.
Additionally, it may be advantageous to arrange that is constant on the path: this will usually lead to greater regions of validity and sharper error bounds.
…However, for the purpose of simply deriving the asymptotic expansions the use of steepest descent paths is not essential.
…
…
►In (4.37.1) the integration path may not pass through either of the points , and the function assumes its principal value when is real.
In (4.37.2) the integration path may not pass through either of the points , and the function assumes its principal value when .
Elsewhere on the integration paths in (4.37.1) and (4.37.2) the branches are determined by continuity.
In (4.37.3) the integration path may not intersect .
…
►The principal values (or principal branches) of the inverse , , and are obtained by introducing cuts in the -plane as indicated in Figure 4.37.1(i)-(iii), and requiring the integration paths in (4.37.1)–(4.37.3) not to cross these cuts.
…
 ►
►
 ►
►

{kind=link}
{kind=link}