►A parametrizedsurface
is defined by
…
►►The area
of a parametrized smooth surface is given by
…
►The integral of a continuous function
over a surface
is
…
►Applications of Struve functions occur in water-wave and surface-wave problems (Hirata (1975) and Ahmadi and Widnall (1985)), unsteady aerodynamics (Shaw (1985) and Wehausen and Laitone (1960)), distribution of fluid pressure over a vibrating disk (McLachlan (1934)), resistive MHD instability theory (Paris and Sy (1983)), and optical diffraction (Levine and Schwinger (1948)).
…
…
►The hypergeometric function has allowed the development of “solvable” models for one-dimensional quantum scattering through and over barriers (Eckart (1930), Bhattacharjie and Sudarshan (1962)), and generalized to include position-dependent effective masses (Dekar et al. (1999)).
►More varied applications include photon scattering from atoms (Gavrila (1967)), energy distributions of particles in plasmas (Mace and Hellberg (1995)), conformal field theory of critical phenomena (Burkhardt and Xue (1991)), quantum chromo-dynamics (Atkinson and Johnson (1988)), and general parametrization of the effective potentials of interaction between atoms in diatomic molecules (Herrick and O’Connor (1998)).
…
►In 1957, Davis took over as Chief, Numerical Analysis Section when John Todd and his wife Olga Taussky-Todd, feeling a strong pull toward teaching and research, left to pursue full-time positions at the California Institute of Technology.
…
►NBS mathematician Irene Stegun took over management of the A&S project which was already well on its way, and led the work to publication in 1964.
…
►Davis’s comments about our uninspired graphs sparked the research and design of techniques for creating interactive 3D visualizations of function surfaces, which grew in sophistication as our knowledge and the technology for developing 3D graphics on the web advanced over the years.
…DLMF users can rotate, rescale, zoom and otherwise explore mathematical function surfaces.
The surface color map can be changed from height-based to phase-based for complex valued functions, and density plots can be generated through strategic scaling.
…
§21.10(ii) Riemann Theta Functions Associated with a Riemann Surface
►In addition to evaluating the Fourier series, the main problem here is to compute a Riemann matrix originating from a Riemann surface.
…
►
•
Belokolos et al. (1994, Chapter 5) and references therein. Here the
Riemann surface is represented by the action of a Schottky group on a region of
the complex plane. The same representation is used in Gianni et al. (1998).
…
►Surface visualizations in the DLMF represent functions of the form by the height or the magnitude, , for complex functions, over the plane.
…
►To provide an easily interpreted encoding of surface heights, a rainbow-like mapping of height to color is used.
…
►By painting the surfaces with a color that encodes the phase, , both the magnitude and phase of complex valued functions can be displayed.
…
intersection index of and , two cycles lying on a closed
surface. if and do not intersect.
Otherwise gets an additive contribution from every
intersection point. This contribution is if the basis of
the tangent vectors of the and cycles
(§21.7(i)) at the point of intersection is
positively oriented; otherwise it is .
…
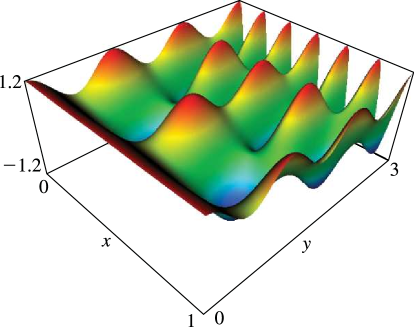
►Figure 21.4.1 provides surfaces of the scaled Riemann theta function , with
…This Riemann matrix originates from the Riemann surface represented by the algebraic curve ; compare §21.7(i).
►
…
Figure 21.4.1: parametrized by (21.4.1).
The surface plots are of , , (suffix 1); , , (suffix 2); , , (suffix 3).
…
…
►►
►Figure 21.4.5: The real part of a genus 3 scaled Riemann theta function: , , .
This Riemann matrix originates from the genus 3 Riemann surface represented by the algebraic curve ; compare §21.7(i).
Magnify3DHelp
 ►
►

{kind=link}
{kind=link}
{kind=link}