logarithmic%20integral
(0.004 seconds)
1—10 of 26 matching pages
1: 6.16 Mathematical Applications
 ►
►
2: 6.19 Tables
Abramowitz and Stegun (1964, Chapter 5) includes the real and imaginary parts of , , , 6D; , , , 6D; , , , 6D.
3: 6.20 Approximations
Cody and Thacher (1968) provides minimax rational approximations for , with accuracies up to 20S.
Cody and Thacher (1969) provides minimax rational approximations for , with accuracies up to 20S.
MacLeod (1996b) provides rational approximations for the sine and cosine integrals and for the auxiliary functions and , with accuracies up to 20S.
Clenshaw (1962) gives Chebyshev coefficients for for and for (20D).
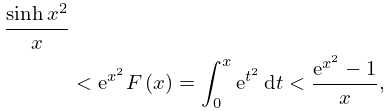
4: 7.8 Inequalities
5: Bibliography M
6: 25.12 Polylogarithms
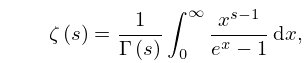
Integral Representation
… ►§25.12(iii) Fermi–Dirac and Bose–Einstein Integrals
►The Fermi–Dirac and Bose–Einstein integrals are defined by … ►In terms of polylogarithms …7: 25.20 Approximations
Cody et al. (1971) gives rational approximations for in the form of quotients of polynomials or quotients of Chebyshev series. The ranges covered are , , , . Precision is varied, with a maximum of 20S.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}