half argument
(0.001 seconds)
11—20 of 22 matching pages
11: 34.2 Definition: Symbol
…
►Either all of them are nonnegative integers, or one is a nonnegative integer and the other two are half-odd positive integers.
…
►
34.2.1
…
►
34.2.2
,
…
►and the summation is over all nonnegative integers such that the arguments in the factorials are nonnegative.
…
►For alternative expressions for the symbol, written either as a finite sum or as other terminating generalized hypergeometric series of unit argument, see Varshalovich et al. (1988, §§8.21, 8.24–8.26).
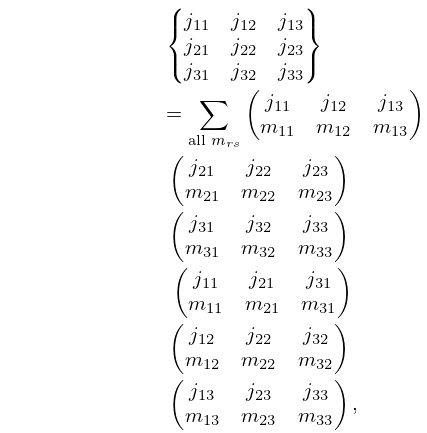
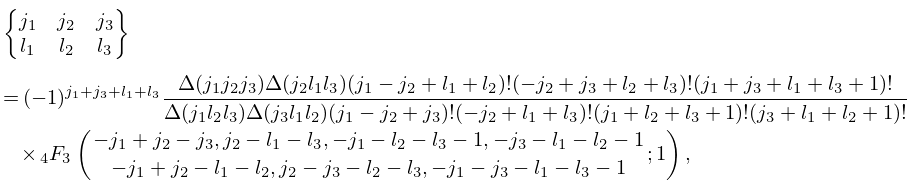
12: 34.6 Definition: Symbol
…
►
34.6.1
►
34.6.2
►The symbol may also be written as a finite triple sum equivalent to a terminating generalized hypergeometric series of three variables with unit arguments.
…
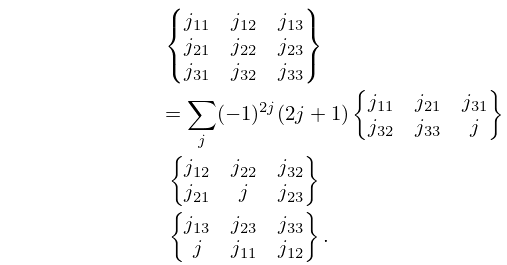
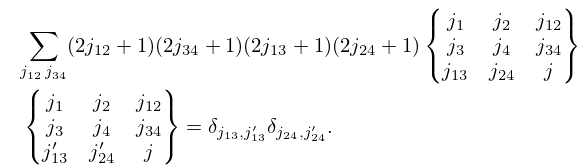
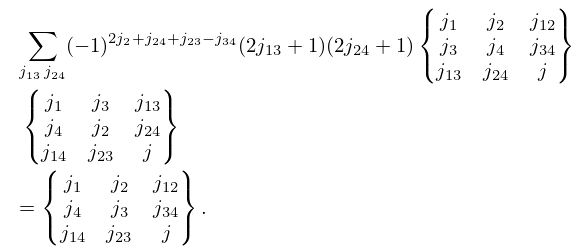
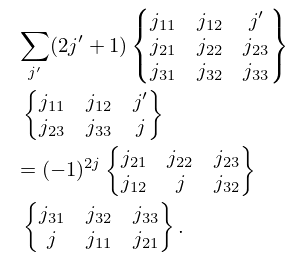
13: 34.7 Basic Properties: Symbol
…
►
34.7.1
…
►Odd permutations of columns or rows introduce a phase factor , where is the sum of all arguments of the symbol.
…
►
34.7.2
…
►
34.7.3
…
►
34.7.5
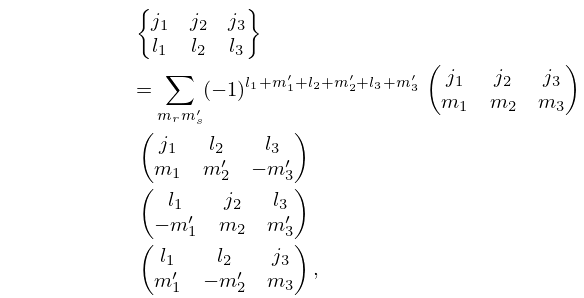
14: 34.4 Definition: Symbol
…
►
34.4.1
…
►
34.4.2
►where the summation is over all nonnegative integers such that the arguments in the factorials are nonnegative.
…
►
34.4.3
…
►For alternative expressions for the symbol, written either as a finite sum or as other terminating generalized hypergeometric series of unit argument, see Varshalovich et al. (1988, §§9.2.1, 9.2.3).
15: 19.23 Integral Representations
16: 15.19 Methods of Computation
…
►For it is always possible to apply one of the linear transformations in §15.8(i) in such a way that the hypergeometric function is expressed in terms of hypergeometric functions with an argument in the interval .
►For it is possible to use the linear transformations in such a way that the new arguments lie within the unit circle, except when .
This is because the linear transformations map the pair onto itself.
…
►For example, in the half-plane we can use (15.12.2) or (15.12.3) to compute and , where is a large positive integer, and then apply (15.5.18) in the backward direction.
…
17: 19.16 Definitions
…
►
19.16.9
, , ,
…
►
19.16.12
…
►
is an elliptic integral iff the ’s are distinct and exactly four of the parameters are half-odd-integers, the rest are integers, and none of , , is zero or a negative integer.
…
18: Bibliography P
…
►
On two-sided estimates, uniform with respect to the real argument and index, for modified Bessel functions.
Mat. Zametki 65 (5), pp. 681–692 (Russian).
…
►
Exactification of the method of steepest descents: The Bessel functions of large order and argument.
Proc. Roy. Soc. London Ser. A 460, pp. 2737–2759.
…
►
Evaluation of the Fermi-Dirac integral of half-integer order.
Zastos. Mat. 21 (2), pp. 289–301.
…
19: Bibliography G
…
►
Algorithm 259: Legendre functions for arguments larger than one.
Comm. ACM 8 (8), pp. 488–492.
…
►
Algorithm 957: evaluation of the repeated integral of the coerror function by half-range Gauss-Hermite quadrature.
ACM Trans. Math. Softw. 42 (1), pp. 9:1–9:10.
…
►
Some integrals involving three Bessel functions when their arguments satisfy the triangle inequalities.
J. Math. Phys. 25 (11), pp. 3350–3356.
…
►
Evaluation of Legendre functions of argument greater than one.
Comput. Phys. Comm. 105 (2-3), pp. 273–283.
…
►
Algorithm 831: Modified Bessel functions of imaginary order and positive argument.
ACM Trans. Math. Software 30 (2), pp. 159–164.
…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}