…
►See Yan (1992) for the and functions of matrix argument in the case , and Bingham et al. (1992) for Monte Carlo simulation on applied to a generalization of the integral (35.5.8).
…
…
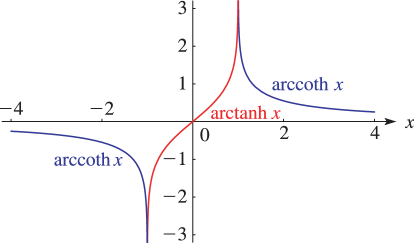
►►►Figure 4.29.4: Principal values of and .
( is complex when or , and is complex when .)
Magnify
…
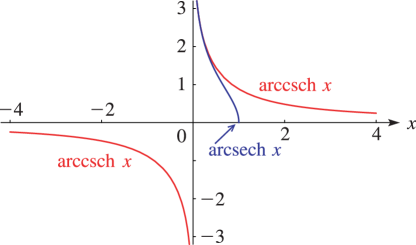
►►►Figure 4.29.6: Principal values of and .
…
Magnify►
§4.29(ii) Complex Arguments
►The conformal mapping is obtainable from Figure 4.15.7 by rotating both the -plane and the -plane through an angle , compare (4.28.8).
…
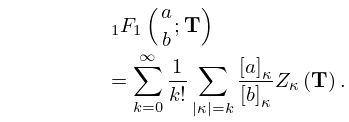
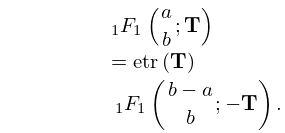
Originally the matrix in the argument of the Gaussian hypergeometric function
of matrix argument
was written with round brackets. This
matrix has been rewritten with square brackets to be consistent with the rest
of the DLMF.
…
►Let (a) be orthogonally invariant, so that is a symmetric function of , the eigenvalues of the matrix argument
; (b) be analytic in in a neighborhood of ; (c) satisfy .
…
►Systems of partial differential equations for the (defined in §35.8) and functions of matrix argument can be obtained by applying (35.8.9) and (35.8.10) to (35.7.9).
…
…
►Multidimensional Mellin–Barnes integrals are established in Ding et al. (1996) for the functions and of matrix argument.
A similar result for the function of matrix argument is given in Faraut and Korányi (1994, p. 346).
…
…
►Unless stated otherwise in §§14.2–14.20 it is assumed that the arguments of the functions and lie in the interval , and the arguments of the functions , , and lie in the interval .
…
 ►
►
 ►
►

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}