►The Kontorovich–Lebedev transform of a function is defined as
…
►For asymptotic expansions of the direct transform (10.43.30) see Wong (1981), and for asymptotic expansions of the inverse transform (10.43.31) see Naylor (1990, 1996).
►For collections of the Kontorovich–Lebedev transform, see Erdélyi et al. (1954b, Chapter 12), Prudnikov et al. (1986b, pp. 404–412), and Oberhettinger (1972, Chapter 5).
…
…
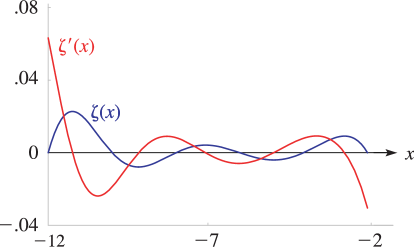
►►►Figure 25.3.2: Riemann zeta function and its derivative , .
Magnify
…
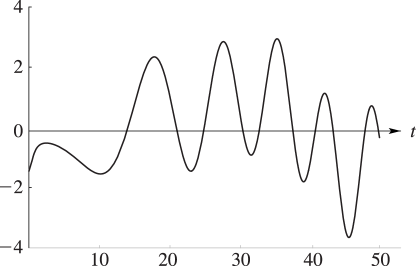
►►►Figure 25.3.4:
, .
and have the same zeros.
…
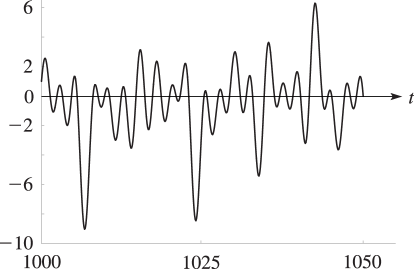
Magnify►►►Figure 25.3.5:
, .
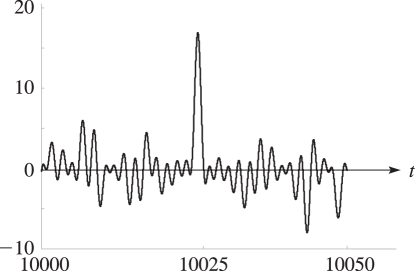
Magnify►►►Figure 25.3.6:
, .
Magnify
…
►The cross ratio of is defined by
…or its limiting form, and is invariant under bilineartransformations.
►Other names for the bilineartransformation are fractional linear
transformation, homographic transformation, and Möbius
transformation.
…
…
►Descending Gauss transformations of (see (19.8.20)) are used in Fettis (1965) to compute a large table (see §19.37(iii)).
…If , then the method fails, but the function can be expressed by (19.6.13) in terms of , for which Neuman (1969b) uses ascending Landen transformations.
…
►Quadratic transformations can be applied to compute Bulirsch’s integrals (§19.2(iii)).
…The function is computed by descending Landen transformations if is real, or by descending Gauss transformations if is complex (Bulirsch (1965b)).
…
…
►Calculations relating to the zeros on the critical line make use of the real-valued function
…is chosen to make real, and assumes its principal value.
Because , vanishes at the zeros of , which can be separated by observing sign changes of .
Because changes sign infinitely often, has infinitely many zeros with real.
…
►Sign changes of are determined by multiplying (25.9.3) by to obtain the Riemann–Siegel formula:
…
…
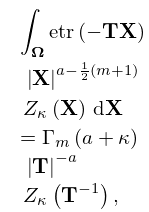
►For any partition , the zonal polynomial
is defined by the properties
…
►Therefore is a symmetric polynomial in the eigenvalues of .
…
►For ,
…
►For and ,
►
…
►For define the homogeneous hypergeometric polynomial
…
►If , then (19.19.3) is a Gauss hypergeometric series (see (19.25.43) and (15.2.1)).
…
►and define the -tuple .
…
►The number of terms in can be greatly reduced by using variables with chosen to make .
…
►
…
►It has elegant structures, including -soliton solutions, Lax pairs, and Bäcklund transformations.
While the Toda equation is an important model of nonlinear systems, the special functions of mathematical physics are usually regarded as solutions to linear equations.
However, by using Hirota’s technique of bilinear formalism of soliton theory, Nakamura (1996) shows that a wide class of exact solutions of the Toda equation can be expressed in terms of various special functions, and in particular classical OP’s.
…
►
M. J. Ablowitz and H. Segur (1981)Solitons and the Inverse Scattering Transform.
SIAM Studies in Applied Mathematics, Vol. 4, Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA.
F. V. Andreev and A. V. Kitaev (2002)Transformations
of the ranks and algebraic solutions of the sixth Painlevé equation.
Comm. Math. Phys.228 (1), pp. 151–176.
R. Askey (1974)Jacobi polynomials. I. New proofs of Koornwinder’s Laplace type integral representation and Bateman’s bilinear sum.
SIAM J. Math. Anal.5, pp. 119–124.
 ►
►
 ►
►
 ►
►
 ►
►

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}